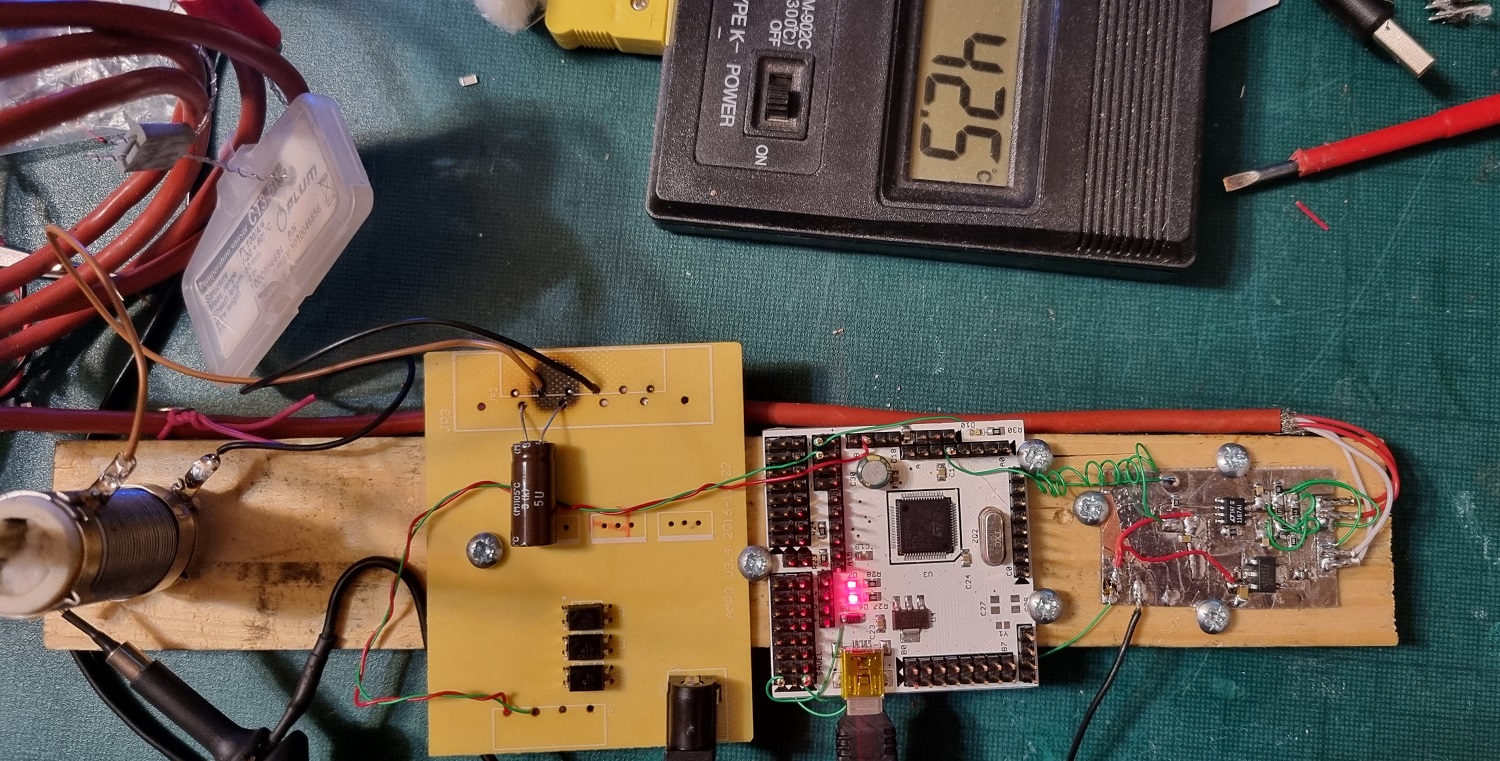
O dabar pašnekėsim apie STM32F4 serijos variantą ir source code. Pirmiausia- kodėl 4 serija? Todėl, kad tokia PCB pasitaikė po ranka. Ir tikrai ne dėl kažkokio mistinio FPU ar net DSP. Ir dar neaišku, ar mano turimas MCU yra originalas, o ne koks nors permarkiruotas šlamštas. Šaltinis solidus, bet kodėl jie juos išmetė? Reikia surasti kur nors panaudotą procesorių ir palyginti.
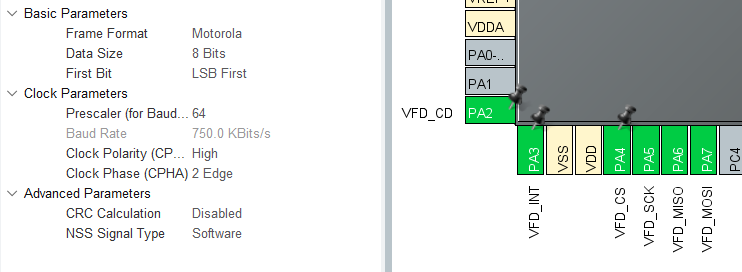
Source code yra sugeneruotas su CubeMX programa, kompiliuota su gcc. Ryšiai su kubiko paprogramėm tik per callback. Ir tai tik naudojam USB biblioteką (virtualus COM portas) ir taimerių pertraukimus. ADC skaitom blokavimo režime.
Pats PID skaičiavimas, float variantas visiškai toks pats kaip ir teoriniam variante:
float pid_generic(float measured, float setpoint, float amplif)
{
float output;
float deritative;
float error;
float proportional;
error = (setpoint - measured)/10;
proportional = error;
integral=integral + error * pid_dt;
deritative = (error - old_error) / pid_dt;
old_error = error;
output = (PID_KP * proportional + PID_KI * integral + PID_KD * deritative) * amplif;
return output;
}
Atsirado papildomas parametras “amplif” – tai bendro rezultato daugiklis, kaip ir sustiprinimas (ar susilpninimas). Teoriškai tą patį galima atlikti su pagrindiniais parametrais (P, I, D), bet taip lengviau priderinti prie “krosnelės” galingumo: kaitinimas dirba su integer skaičiais, ir PID rezultatas apsiapvalina. Taip prarandam “jautrumą”. Ir dar temperatūros parodymus pasmulkinam- tik dėl koeficientų.
uint32_t CalcTemp(void)
{
uint32_t a;
a=median_filter(adc_read_blocking(ADC_CHANNEL_4));
a=median_filter(adc_read_blocking(ADC_CHANNEL_4));
//a=median_filter(adc_read_blocking(ADC_CHANNEL_4));
// 786 - max t, 0.62V ->1655
// 3529 - kambario t, 2.83V -> 283
return (4096-a)/2; //12 bitų max apverčiam ir pašalinam LSB.
}
Dėl ADC blogumo, matuojam kelis kartus, invertuojam (dėl schemotechnikos išėjimas mažėja didėjant temperatūrai) ir pašalinam mažiausią bitą, nes jis rodo kvailystes. Funkcija “median filter” vogta iš interneto. Tai funkcija, kuri teoriškai turi išfiltruoti sporadiškus nukrypimus: jei eina 5, 6, 4, 3, 100 – tai tas šimtas kaip ir ne į temą. Kiek veikia per daug netikrinau. Manau, reikia dar padidinti buferį.
readtemp=CalcTemp();
pwm=PID(readtemp, SETTEMP);
SetPWM(pwm);
O čia pats pagrindinis ciklas, kuris kartojamas sistemingai: 1 – nuskaitom, 2 – paskaičiuojam. 3 – valdom kaitinimą.
Visas likęs source kodas aptarnauja kontrolerio valdymą per terminalą (galima keisti parametrus) ir duomenų išmetimą analizei. Tai tik eksperimentinis variantas- darbiniam trūksta dar visokių apsaugų, normalaus valdymo ir indikacijos. Ir aišku, išėjimas čia PWM, kad tinkama mažam rezistoriui, bet ne tikram šildytuvui. Dar nesugalvojau, kaip padaryti korektiškai proporcinį valdymą realiai rėlei ar 50Hz simistoriniam reguliatoriui. Jei užteks kantrybės, tema bus vystoma.
Pats pilnas STM32F446 PID controller source code skirtas gcc ir kartu CubeMX projekto failas (versija užrakinta posto datai, galimi patobulinimai). Prie papildų- median filter, ftoa ir usb paprogramės. Visa mano kūryba “USER” aplanke.