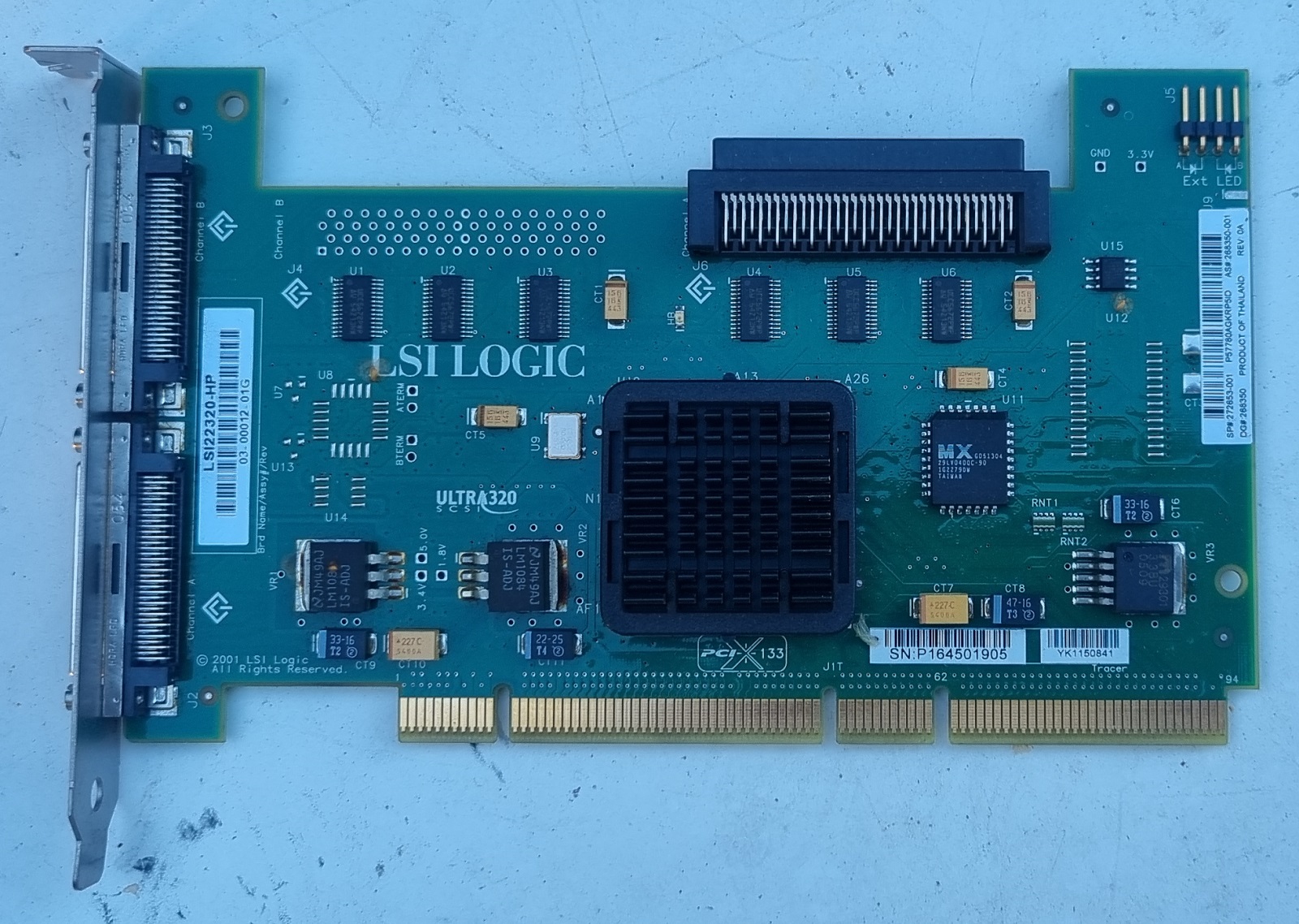
Nešmenų skaitytuvai. Visi SCSIIr aišku visos jungtys skirtingosPačios nešmenos. Su keliom teko dirbti?Ši kasetė turi konstrukcinį defektą- verbatim jau bloga.Kažkur pamečiau normalias PCI SCSI plokštes. Radau tik šitą, 64 bitų nesąmone.Senas pentiumas su milžinišku serverinių juostų skaitytuvu.
Visada, jei tik pamatau kokią nors kasetę ar keistą diskelį, visada tempiu į kolekciją. Kartu tempiu ir skaitytuvus. Visi skaitytuvai SCSI standarto. Vakar nutariau surinkti visus savo SCSI daiGtus ir sudėti į vieną vietą, gal net ir išbandyti. Nes turiu gana didelę kolekciją kasečių. Tačiau kažkur praganiau savo geriausia SCSI PCI adapterį. Aš net senovinį kompą paleidau, su PCI ir ISA jungtimis, o Adaptekas kažkur dingo (vieną rodos padovanojau kažkam, bet turėjau dar kokius du). Dar turiu rodos SCSI skanerį, tačiau jis dar mėtosi garaže.
Turiu LSI LOGIC serverinį SCSI kontrolerį, bet jis PCI 64 bitų. Internetai rašo, kad šios plokštės suderinamos su 32 bitų lizdu, tik turi sutapti išpjovos (5V ar 3.3V sistema). Mano senam kompe “įtampos” išpjovos sutampa, tačiau plokštė neįsikiša- galas lizdo per kokį milimetrą remiasi. Ar tai tik lizdo bėda (galima pazulinti) ar tikrai nesuderinti standartai.
Aišku dar problemos su laidais- yra 25, 50 kontaktų laidai kaip printeriui, yra siauri ir platūs siauro žingsnio laidai, yra vidiniai plokšti (0.1″ žingsnio) ir siauri kažkokie pamažinti daugiakontakčiai. Žodžiu- chaosas. Bet vistiek norių paleisti savo SCSI kolekciją.
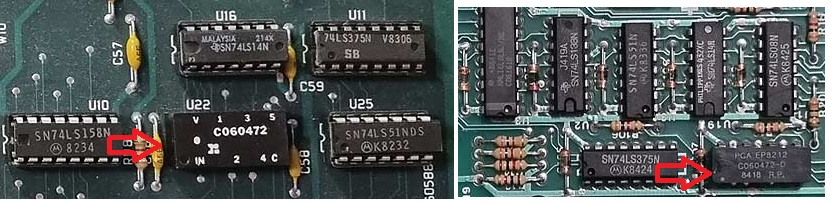
Kai kuriuose senesniuose Atari kompiuteriuose yra pastorintas, hibridinis čipas su kodu CO60472. Tai uždelsimo linija (delay line). Kompiuteris naudoja dinamines atminties mikroschemas ir ten RAS ir CAS (row, column access strobe) turi eiti viena po kitos, nes pas mikroschemą mažai kojyčių- taip padaromas adreso multipleksavimas. Naujesniuose modeliuose panaudojo ar net 4x didesnio greičio kvarcą ir šį multipleksavimą jau daroma teisingai- sinchroniškai.
CO60472/C060472, PCA EP8212
Šiaip tokios mikroschemos buvo gana populiarios senuose kompiuteriuose, net visokiuose XT/AT mačiau. Kodėl taip buvo daroma? Nežinau, bet gal buvo problemos su x4 dažniais, o gal buvo pigiau. Tačiau šios mikroschemos genda. Pas vienas plaukioja tas uždelsimas, o štai pas mano kompiuterį kelios kojos iš viso neturėjo jokio signalo. Uždelsimą galima daryti praleidžiant signalą per kelis loginius elementus (taip padaryta originaliam atminties išplėtimo modulyje) arba su RC grandine. Kodėl seniau to nedarė? Gal dėl to, kad nebuvo pigių greitų HC mikroschemų.
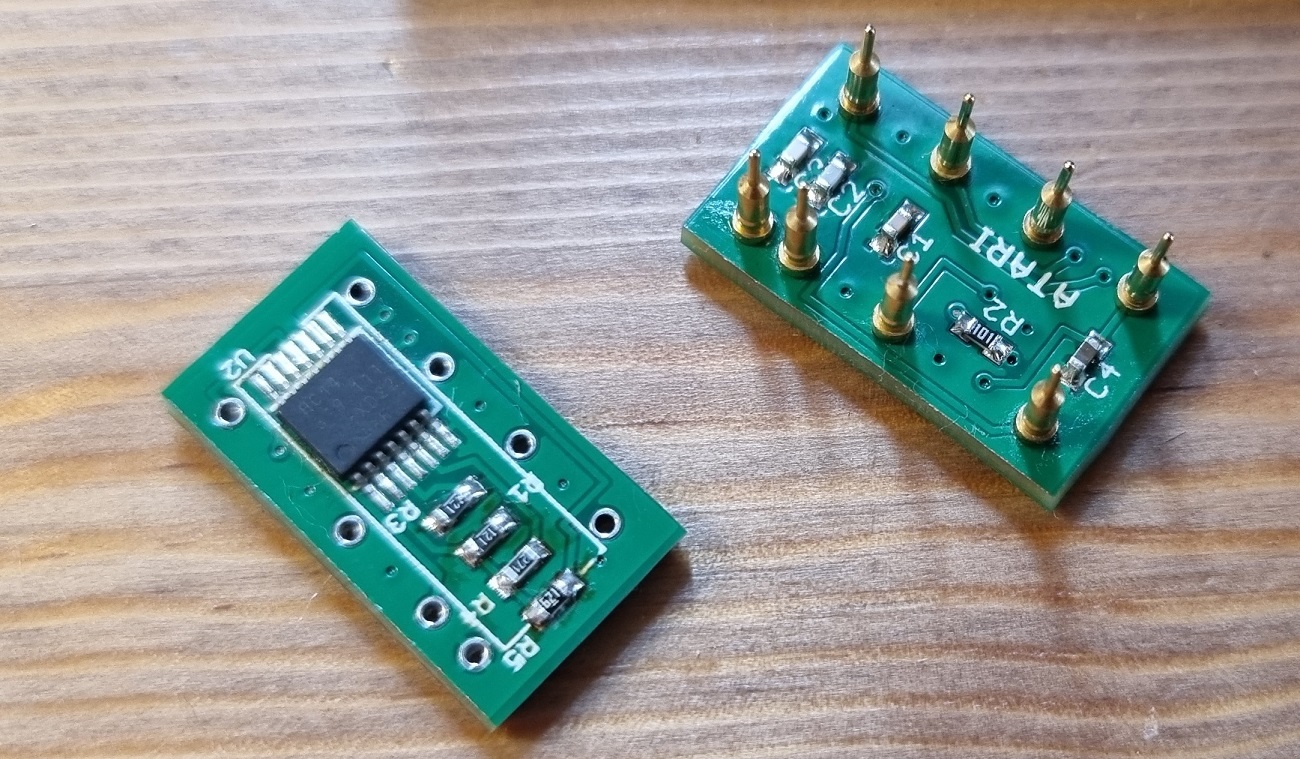
Šiai problemai išspręsti buvo sukurtas pakaitas su 74HC14 ir keliai kondensatoriais ir rezistoriais. Nenorėjau lenkui mokėti už pakaitalą- jo kaina su siuntimu gavosi daugiau nei 10 PCB kitiems projektams, 10 HC14 mikroschemų ir mažų C ir R rinkinys* ir kinijos.
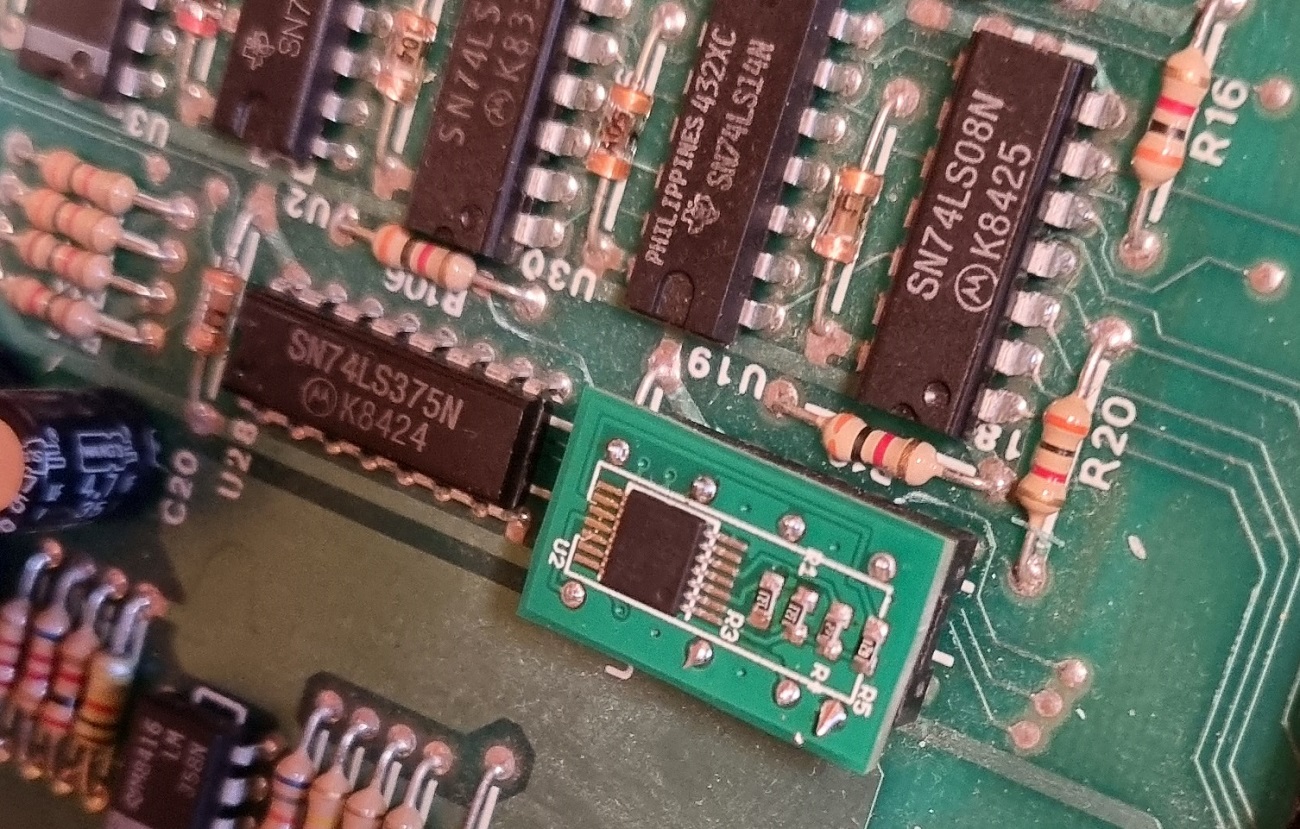
Mano pakaitalo variantas. Skiriasi nuo GitHub versijos tik papildomu kondensatoriumi tarp Vcc ir GND ir mažiau kojyčių- nu taip kažkaip susipaišė labai neužploninant takelių.
biški kreivokai prilituoti maži rezistoriai.
Pakaitalas Atari kompiuteryje iškarto suveikė.
R it C rinkiniai tai knygutės pavidalo, visi galimi 1% R ir 5% C variantai 0605. Brangoki net aliexprese. Turiu ir 0805, bet čia tokie čipai per dideli.
Jau senai buvo sugalvota, kad reikia išlyginti ir kiek apšildyti sieną. Pakeliui kiek pagerinti eksterjero dizainą. Lentelės buvo nupirktos senokai ir jos “kvėpavo” kiemo oru kelis metus. Taip pat kelios lentutės nukentėjo nuo vandens. Tikiuosi nuotraukos į šią galeriją susidės chronologine tvarka.
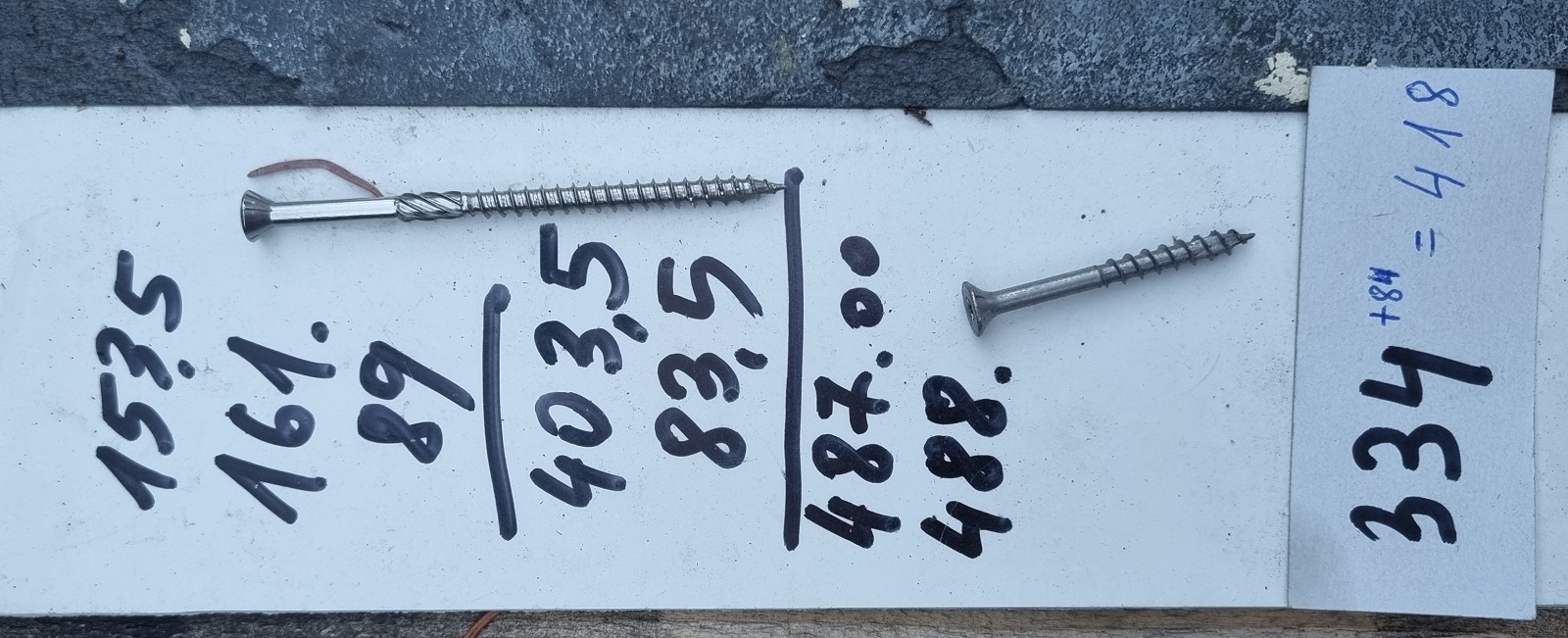
Apatinė plastiko plokštė remiasi į betono “bordiūrą” – pilna apačios hermetizacija. Viršus ventiliuojamasPirkau: 10, 7.5, 5 ir 3 cm storioPo truputi kyla vatos sluoksnis:minkšta ir kieta vataIzoliacinio sluoksnio storis keičiasi- siena labai kreiva dėl statybinių klaidų.Stiklo audinio tinklelis tik prilaiko vatą. Nes atstumai tarp sijų nestandartiniaiVėjo izoliacinė plėvelė duos juodą spalvą per lentučių tarpeliusApipjaustom visus perteklius, kad nesiliestu prie galimo vandensSvarbu užkamšyti visus kampučiusPusė darbo padarytaLiko tik apdailaPjūvis rodo: mediena perkepta per visą gylį.Svarbūs skaičiukai ir INOX varžteliai
Vienas iš pagrindinių reikalų- įrankiai. Jei rankos auga kiek iš šiknos, tai geri ir šiuolaikiniai įrankiai kiek sumažina problemų kiekį. Reikalingi įrankiai: automatinis lazerinis gulsčiukas, skersaruožis pjūklas, ruletė, varžtelių suktukas ir truputis sėkmės.
Jei pradinis karkasas bus teisingas ir ne kreivas, tai tolimesnis surinkimas bus be problemų. Kai montavau, pastebėjau, kad langai stovi 1cm aukščio skirtumu. O tetulė sėkmė, arba mano angelas sargas, arba mažasis lentų kalimo dievas kiek padėjo, kad lentos patogiai susidėliojo. Aš tikrai tiek daug neskaičiavau į priekį- paprasčiausiai pradėjau kalti nuo apatinės langų linijos (palangės), o toliau viskas savaime susidėliojo.
Originali siena buvo ypač kreiva. Gavosi, kad atstumas nuo vertikalės kito nuo 5cm iki 15cm. Todėl su izoliacinėms medžiagom teko pažaisti. Naudojom akmens vatą dėl ventiliacijos ir gaisrosaugos. Pagal nuotraukas matosi, kad buvo naudojamas tinko tinkliukas. Čia tik tam, kad vata nenukristu- nenorėjau apkrauti vėjo apsaugos “plėvelę”.
Sienos “pjūvis” žiūrinti iš vidaus: dažai ir stiklo tapetai, OSB plokštė, garo izoliacinė plėvelė, 5cm uždarų porų plastikas, apie 10-15 cm akmens vata, medinės lentelės (originali siena), 7-15cm akmens vata, stiklo pluošto tinkliukas, vėjo izoliacinė plėvelė, 2.5cm ventiliacinis oro tarpas, degintos medienos (Termomedienos) lentelės.
Tos degintos lentelės teoriškai mažiau pūva, tačiau jos žymiai trapesnės. Todėl karkasas surinktas naudojant standartinę impregnuotą medieną. Visi išoriniai sujungimai padaryti naudojant nerūdijančio plieno varžtus. Vidiniai tvirtinimo elementai- cinkuoto plieno.
Dalis sienos, kuri kontaktuoja su betonu atlikta su papildomu uždarų porų putplasčiu.
Ši siena buvo lengva. Liko dar dvi sienos, tačiau baisi problema- siena antro ir trečio aukščio lygyje. Arba reikia pastolių arba reikia samdyti statybininkus. Jaučiu pastoliai pigiau kainuos.
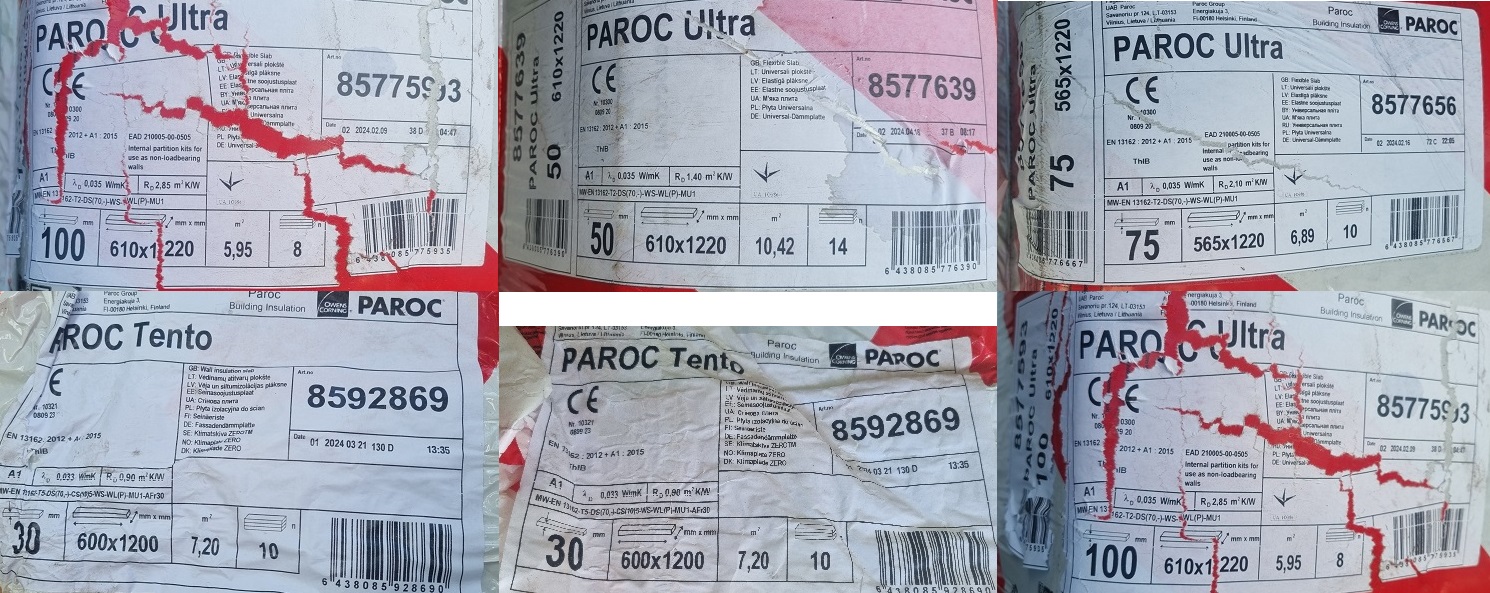
O dabar svarbi informacija, kurios greitai niekur neradau, netgi gamintojo puslapiuose- kiek vatos lakštų yra vatos pakuotėje. Arba kiek kvadratinių metrų. Tai svarbi informacija norint tiksliai paskaičiuoti kiek pakuočių pirkti. Informacija apie PAROC ultra ir tento serijas.
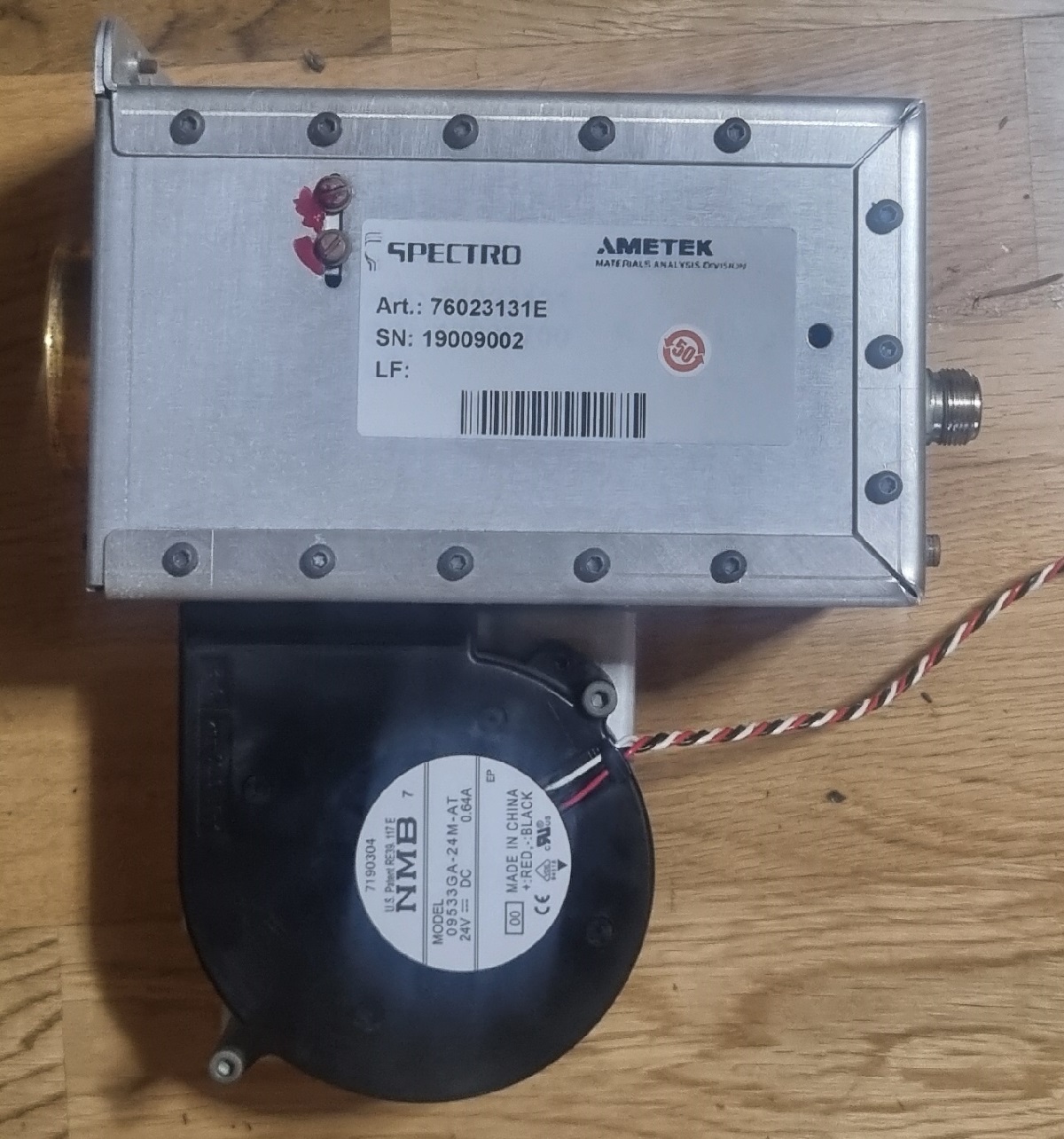
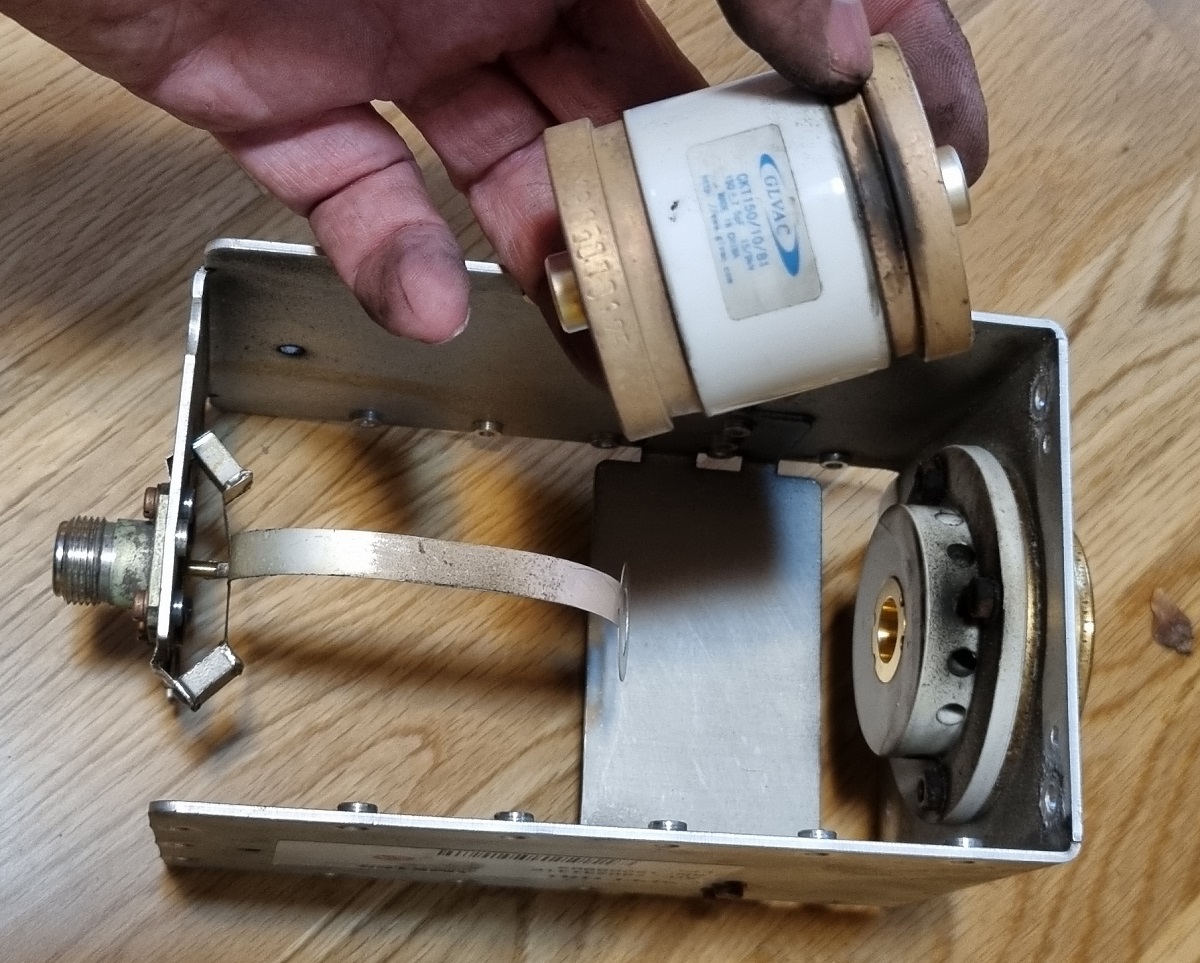
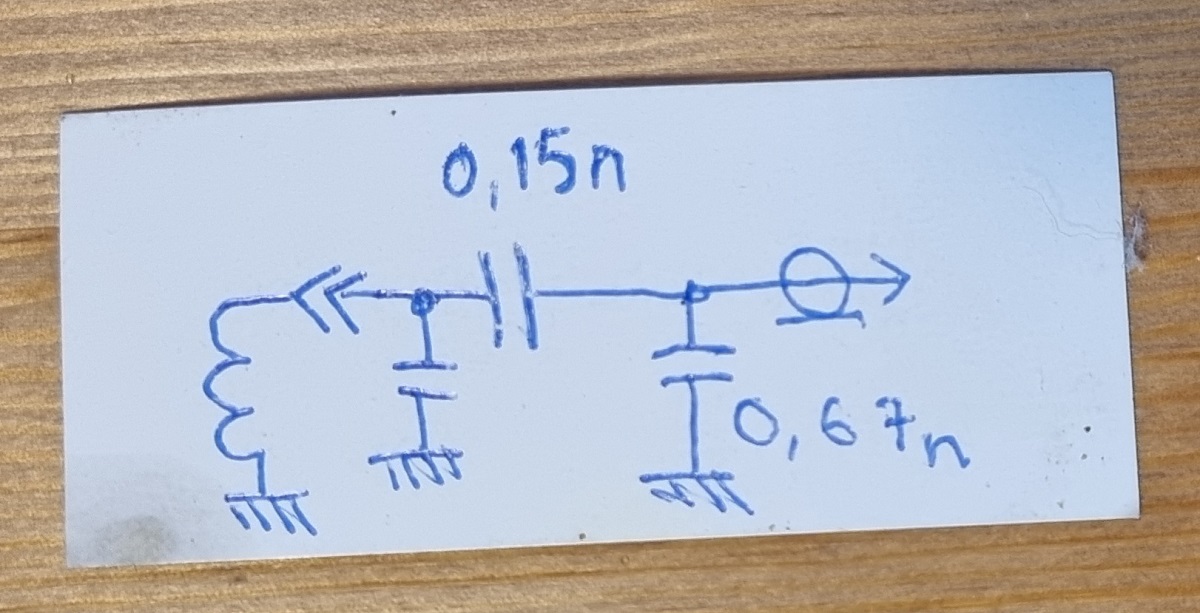
Nelabai suprantu ar tai paralelinis ar nuoseklus rezonansas. Schemoje kairys kondensatorius tai korpuso ir skardelės konstrukcija. Iš raudonų dažų matosi, kad ta skardelė naudojama regulavimui. Ritės parametrų nežinau, bet viela tai maždaug 5mm storio gryno sidabro. O rezonansinis dažnis apie 27MHz.
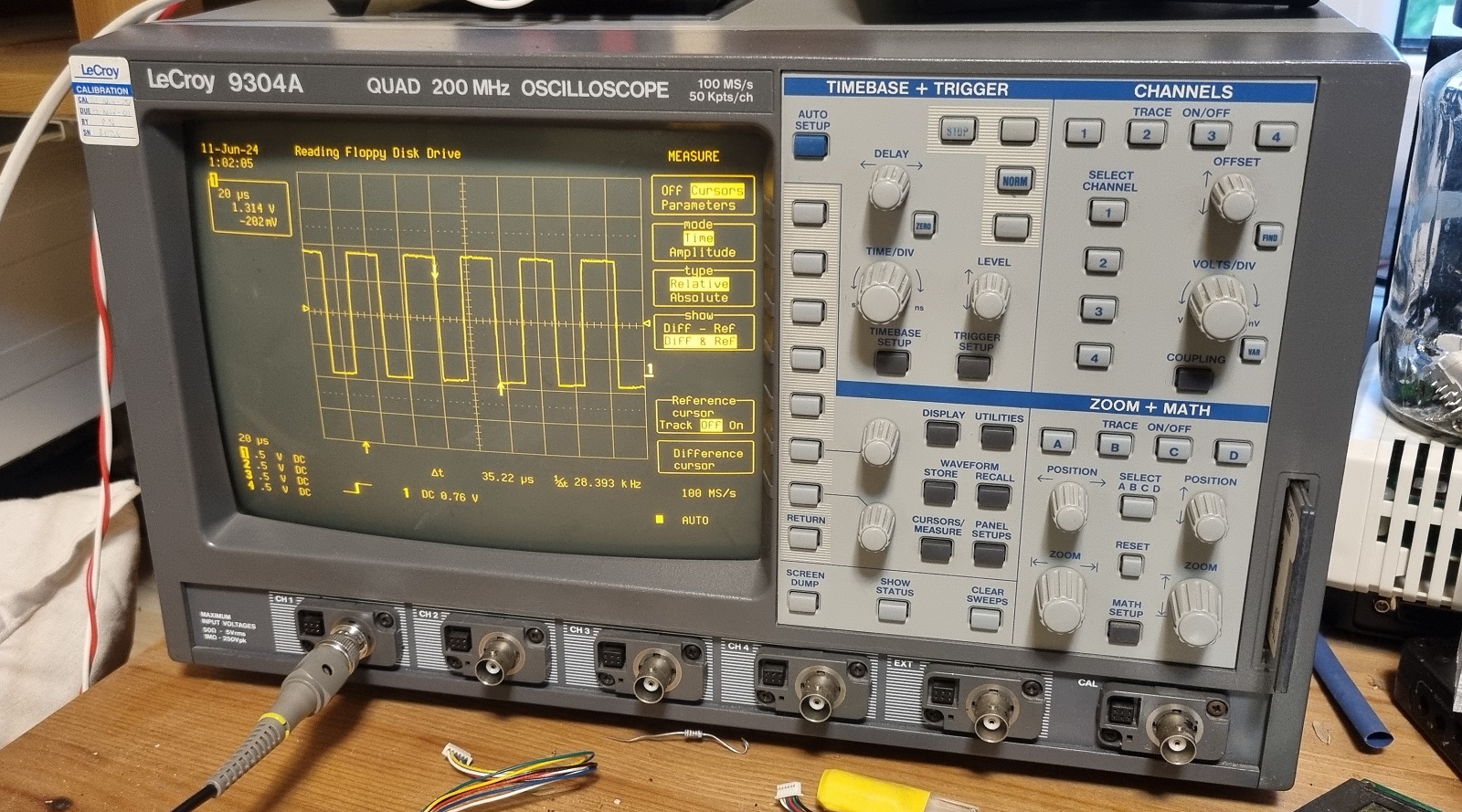
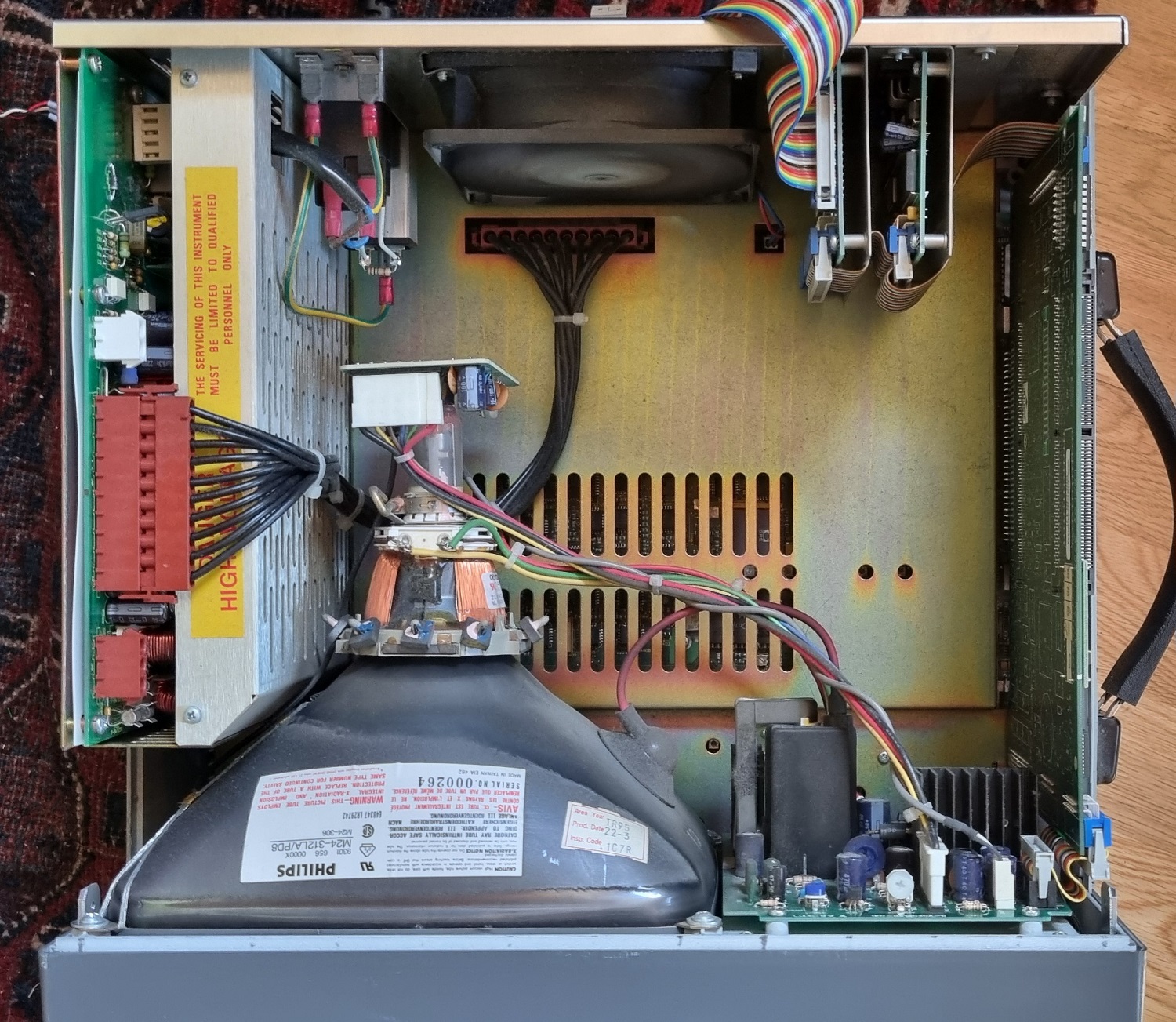
Aš vėl bambėsiu. Esu išbandęs keletą rūšių osciloskopų (oscilografų). Nuo primityviausio tarybinio, kuris tik maždaug parodo, vokiškos chaltūros iki šiuolaikinio, bet kiniško skaitmeninio, su gražiu spalvotu ekranu. Tačiau atsitiko eBay ir “ant durniaus” pastatyta 120€ atnešė priverstinį pirkinį- LeCroy 9304A. Nu, bus į kaimą osciloskopas…
The 9304A and 9304AM are general purpose 200 MHz four channel digital oscilloscopes. They capture single-shot events at up to 100 MS/s, and repetitive signals at 10 GS/s. Record lengths up to 200k points provide excellent horizontal resolution, and allow fast digitizing of long-duration events.
Ir šis agregatas kaip ir veikia. Tiesa vienas sukintojas šlubuoja ir sunku pastatyti kursorių (net baisu pagalvoti apie šio monstro remontą). Ir kogero neveikia FDD. Dėl PCMCIA klausimų yra, bet dar neaišku.
O dabar bambesys- šis, 30* metų senumo monstras, veikiantis ant kokio beviltiško kompiuterio, žymiai geriau veikia nei visi mano anksčiau naudoti osciloskopai. Ypač patinka kad nėra laginimo ir signalo trigeris veikia idealiai. Visas GUI (graphic user interface) atsiranda akimirksniu ir operatyviai reaguoja. Kas trugdo visą šitą operatyvumą perkelti į naujoviškus kiniškus osciloskopus?
Kaip tie 10GS/s veikia aš neįsivaizduoju. Spėju, kad gaunasi kažkoks hibridas tarp “analoginio” ir “atmintinio”. Bet man kaip ir nesvarbu. Svarbu rodo. Ir kogero nėra “falšyvo” skaitmenio “alias” kai dažniai susiplaka ir rodo tipo mažesnį dažnį. Gal ir yra, nes mažai žaidžiau, tačiau ant kiniško iškarto pagavau šias nesąmones, o čia kaip ir nepavyko- per didelis dažnis paprasčiausiai “užbaltavo” ekraną.
*) 1996 metų kataloge yra.
2024.06.16 papildymas
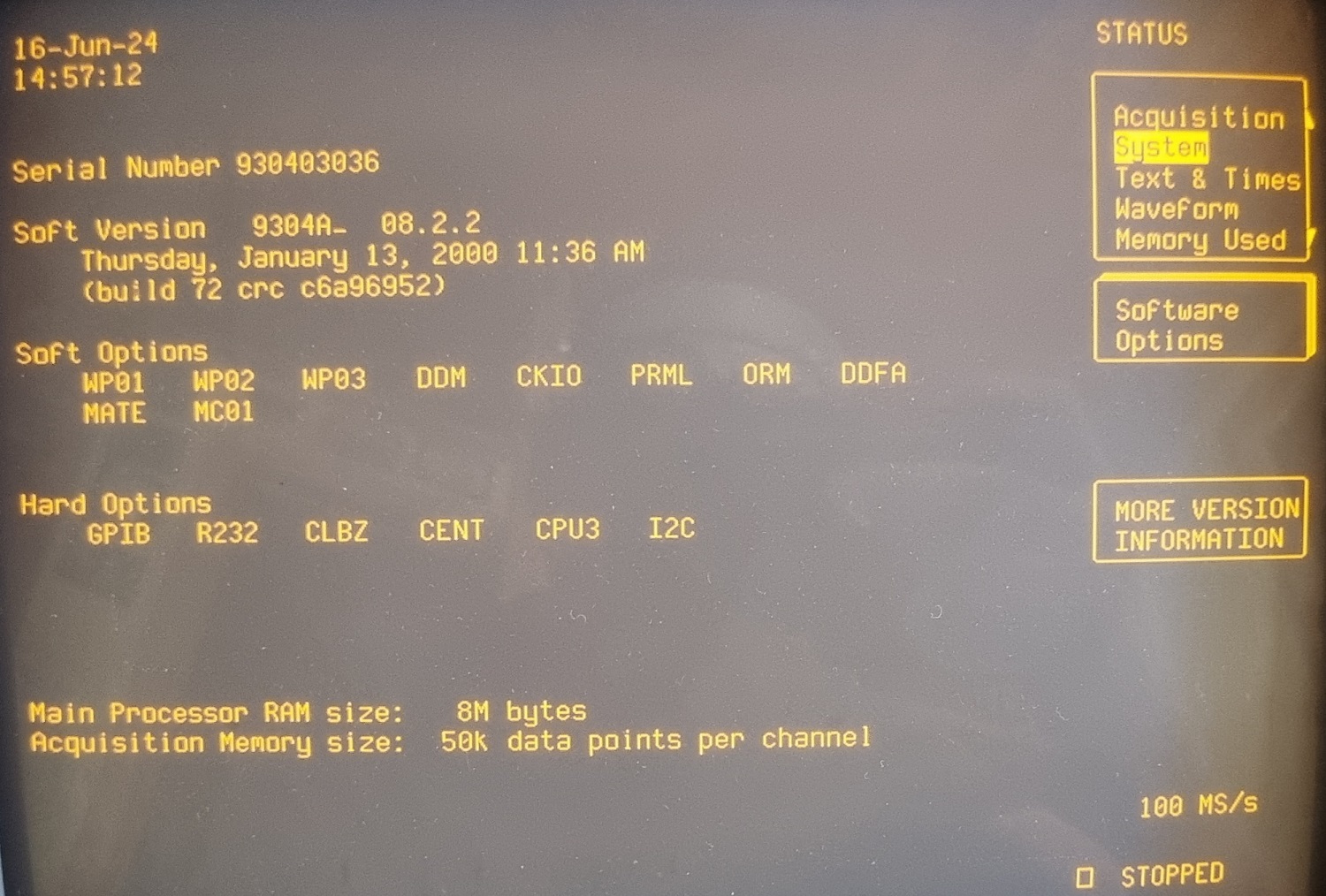
Nusikroviau programinių opcijų GAL fusę failą ir suprogramavau. Tuom įjungiau visas galimas programines opcijas. Pakeliui pastebėjau, kad viduriai nelabai atitinka priekio aprašymus. Čia jau sudėtas geresnis procesorius ir daugiau RAM.
Nelabai matosi, bet čia MC68EC030 procesorius ir 68882 FPU. Ir visos detalės SMD. (LeCroy 9302-1 Rev:B).
Su nauju licenzijų GAL čipų rodo, kad visos “soft options” įjungtos. Ir tikrai atsirado visas kalnas visokių papildomų settingų. Taip pat matosi, kad mano aparatas turi ir hardwarinių gerybių: RS232, Centronix printerio išvadas, GPIB- nu bent visi šitie tai matosi iš aparato galo. CPU3 tai reiškia modernesnis procesorius. O kad yra CLBZ ir I2C aš nežinau. Ir 8M atminties nustebino- pagal aprašymus jos ten vos 2M turėjo būti. Hardwarės lygyje tai maksimalus variantas šiam modeliui. Ir firmwarė kogero naujausia.
Pats aparatas visiškai tuščias.
Tiesa, FDD neveikia- burzgia, bet kogero nesisuka. Pats FDD nestandartinis- lizdas visai kitoks. Tai suremontavimo variantų mažiau. Patiko, kad softe yra opcija- FDD diagnostika. Kur galima pažiūrėti kaip veikia flopikas. Ir … tada!! matyti diskelio duomenis. Matyt buvo kažkoks softas skirtas ištraukti duomenis iš FDD?
Liek tik SIMM/DIMM lizdas. Gal galima prikrauti daugiau atminties? Nors kam?
Saugokit savo veizolus… kažką dariau, kažkur pasukau ir staiga užsitrumpino- žaibai ogogo. Bet akių daktarai nieko baisaus nerado. Sakė ateiti po mėnesio.
Šiuo metu daromos šiokios tokios renovacijos ir balkone, nuo sienos teko nulupti kelis inkilus. Pernai, vasaros metu visada kas nors ten gyvendavo ir labai trukdė remonto darbus- pastoviai reikėjo laukti, kad tėvai pašertu vaikus. Ir šiaip, labai tie paukščiai keldavo triukšmo kai kas nors stovėdavo prie jų inkilo. Dabar jie be “kvatierantų”. Šie inkilai eksperimentiniai- neatitinka jokių standartų. Iš tikro, tai kažkokios dėžutės nuo karinės technikos:
Paprasčiausia plona faniera. Originalios skylutės buvo mažesnės. Kairėje pasididino paukščiai, dešinėje aš jau kiek padėjau. Nes net cypdavo lysdami per skylę.
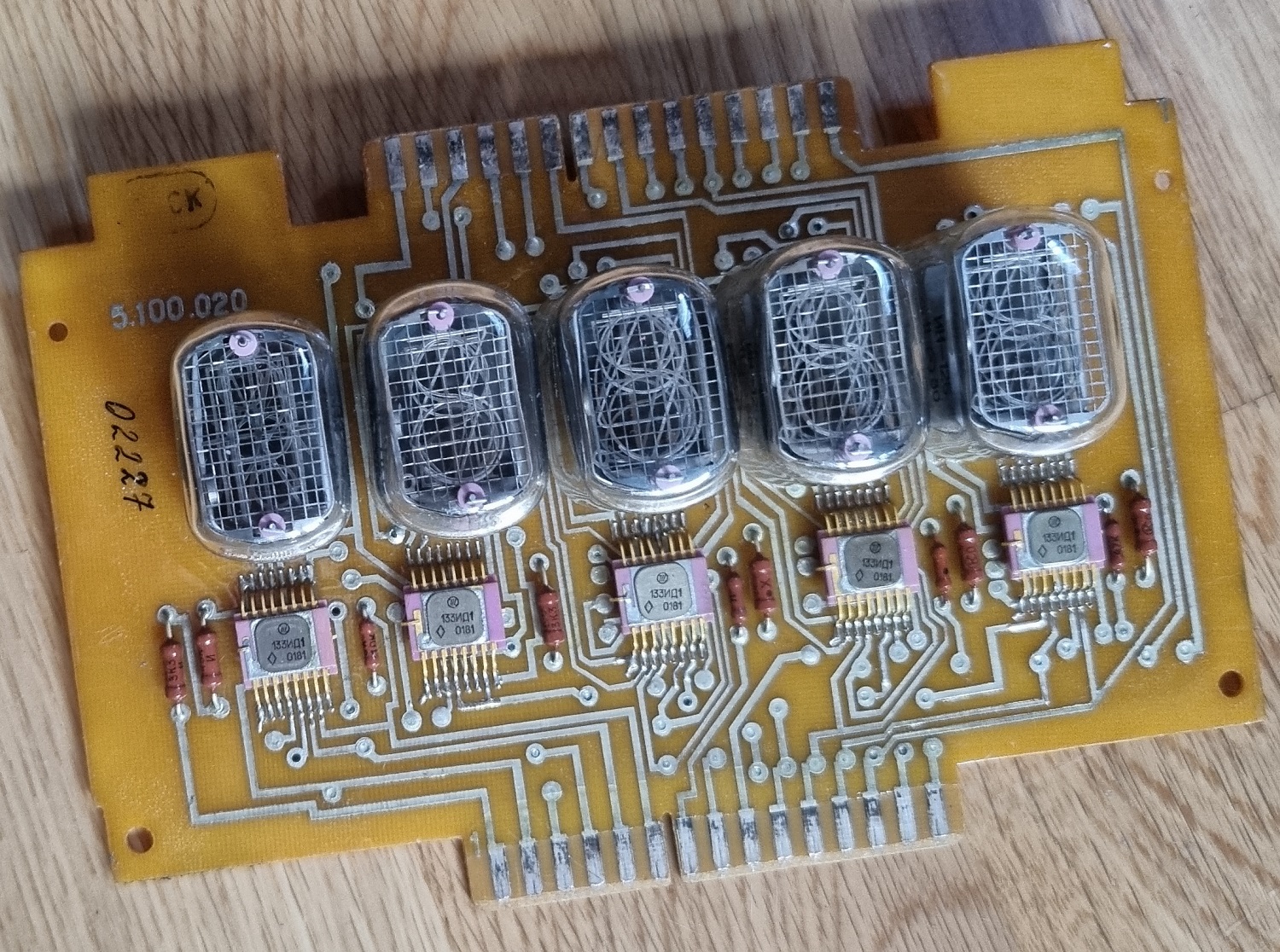
Sidabras ir dujosHonda ir moterysUgniukas pizdukasStalčiukų lentyna arba kasaŠaltas klimato atšilimasNixiai ir auksinės ИД1Inox turėklų atramos ir klinkerio trinkelės
Visiškai nėra straipsnių todėl kad: biški išsisėmiau, neturiu entuziazmo ir yra kitokie vasariniai darbai. O vasarinius darbus reikia daryti. Keletas darbelių, įvykių kurie vyko per pastaruosius du mėnesius.
Sidabro kleckas- gryname sidabre labai gerai tirpsta oras? vanduo? vandenilis? O kai metalas vėsta, gaunasi išsiveržimas. Po keletos ciklų- aušinimo ir perlydymo po fliusu, dujos išeina iš metalo.
Raudona honda biški nusibrėžė. Iš keturių “aksidentų”- trys sukelti moteriškių. Matyt jos nemato raudonos spalvos. Viena atsitrenkė kai stovėjo gatvėje ir bandė apsisukti, kita- stovėjo kieme ir važiavo atbula, o paskutinė- honda važiavo žiedu, o VW nepamatė. 🙂
Tokie vikšrai ėda buksmedžius. Tai kažkokios kandies vardu ugniukas vikšras. Tai buksmedžių pabaigo pradžia.
Pasidariau stalčiukų lentyną- stalčiukai iš senukų, lentyna savadarbė. Be lentynos, konstrukcija pernelyg nestabili. Beja, tokie stalčiukai turi turėti privalomus skyrelius: morgas, random digital chips, random analogue chips ir random chips.
Dėl klimato atšilimo, naktimis ir dienomis taip šalta, kad mano rasoda dalinai nustipo, dalinai užsikonservavo ir nebeauga. O kas išaugo buvo suėsta slimokų.
Nixiu plokštė su auksinėms mikroschemom. Reikia kažkokį dizainą sugalvoti, kad matytųsi visa plokštė.
Verandos turėklų elementai (inox 321)- nes užkniso rudys. Ir prabangios klinkerio trinkelės šiltnamio grindim.
Va tiek reikalų. Jei bus kas nors indomaus, būtinai parašysiu.
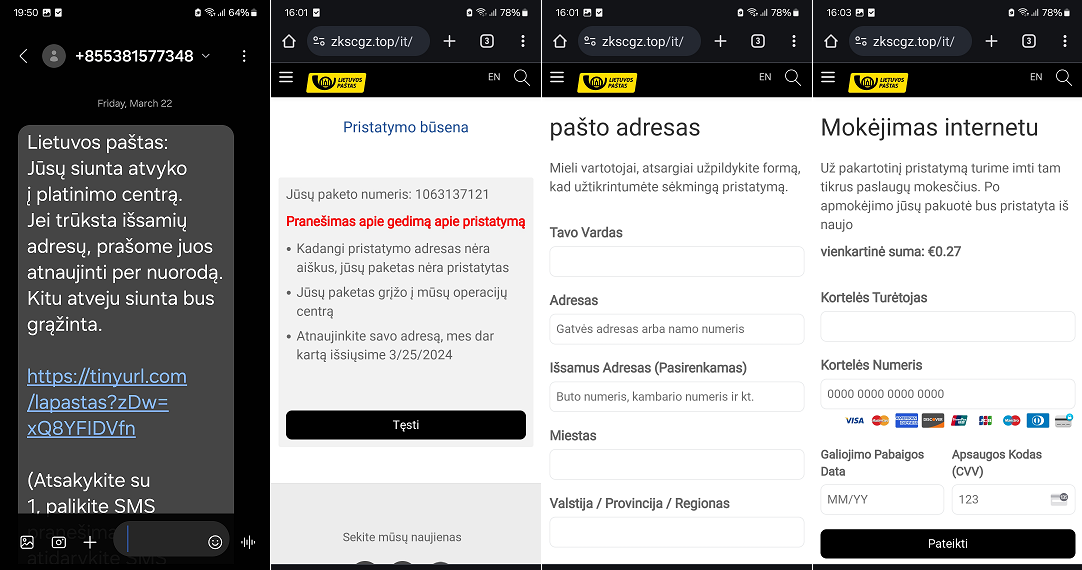
Nespauskit keistų linkų kuriuos gaunat. Aš spaudau už jus, kad žinotumėt.
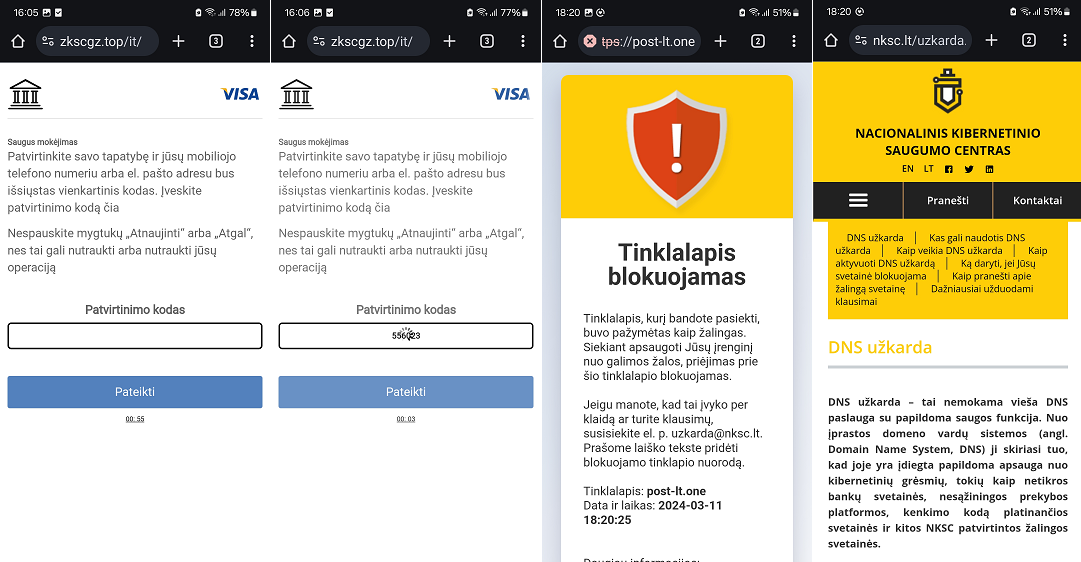
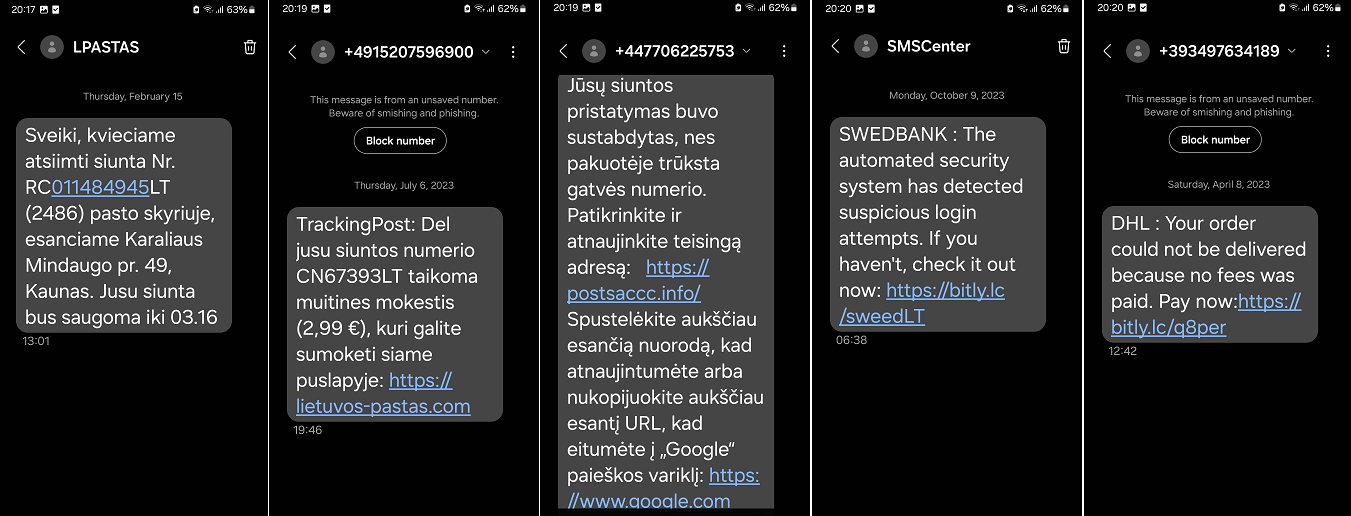
Scenarijus paprastas- ateina žinutė apie neva nepristatytas siuntas. Ten būna dažnai keistoka nuoroda:
Nelabai gramatana žinutė turėtu kaip ir duoti įspėjimus. Atsidaręs interneto puslapis savo gramatika irgi sako, kad kažkas negerai. Žmogai, jei atsidarėte žinutę, kuri rašo apie jūsų siuntą ir jie jau žino telefoną, tai kodėl vėl prašo asmeninės informacijos? (Ten žemiau buvo ir telefono laukelis). O sekantis ekranas jau sako, kad reikia tik 0.27€ užmokėti. Tačiau bjaurus paštas tikrai be dviejų eurų nieko nedaro 🙂 Aha, ir kortelė ir CVV. Gal dar raktą nuo kambario su pinigais?
O, va ir kambario raktas. T.y. anonimiškas “bankas” ir patvirtinimo kodas. Aš naudojau randominį telefoną (nu ne randominį, bet policijos) ir generuotą kreditinę kortelę. Todėl galiu tik spėti apgavystės mechanizmą. Tikriausiai į mobilų ateina kažkas dar, gal koks netikras bankas. Gal šiuo momentu jau pasijungia gyvas žmogus kuris pradeda rankiniu metodu dirbti tarpine tarp aukos ir banko. Tačiau mano eksperimente įvedus bet kokius skaičius, puslapis užlinko.
O bonuse, tokius puslapius blokuoja mūsų pareigūnai. Tai jei neskubėsite spausti nuorodos, tai vėliau ji gali pasirodyti tokia kaip paveiksliuko dešinėje.
O dabar bambesys ir patarimai- net jei ir laukiate siuntos, neskubėkite. Niekur ta siunta nedings, nepanikuokit. Skaitykit atidžiai ir galvokite logiškai- kodėl? Kam jies to reikia? Kur jūsų siuntos identifikacinis numeris. Kodėl siuntėjo numeris ne iš Lietuvos? Kodėl interneto adresas toks keistas? O jei tikrai nerimas dėl siuntos, tai eikite į oficialų pašto puslapį. Nežinot siuntos numerio? Tai iš viso ko čia blaškotės? Laukite lapuko savo pašto dėžutėje. Ar net didelio laiško.
Visi dokumentai pildomi tik oficialiam pašto interneto puslapyje, o apkomėti galima tik teisingai prisiregistravus prie lpexpress savitarnos. Nebūkit šiuolaikiniai hipsteriai, kurie viską bando daryti savo ultra išmaniu įrenginiu, kuriame sudėtos VISOS JŪSŲ PASLAPTYS! Žinot patarlę apie “visus kiaušinius vienoje kraitelėje”?