
Pasišlykštėjęs kiniškų termokontroleriu nutariau kiek pasidomėti PID kontrolerio teorija. O tam reikėjo pasirašyti šildytuvo modelį (emuliatorių).
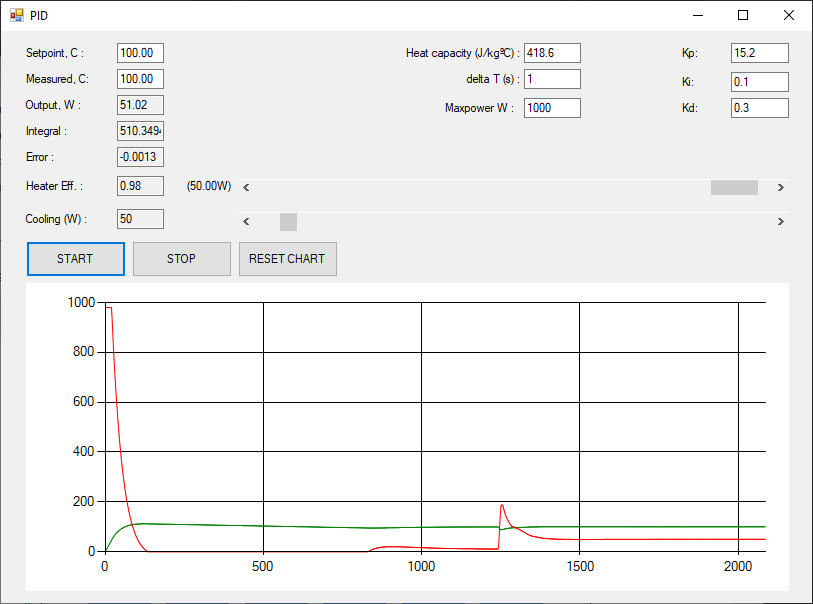
Gavosi maždaug toks. Tai 100ml vandens kuris neverda (sferinio arklio vakuume) kaitintuvas su stabiliu aušinimu. Man tikrai patiko, kaip kontroleris reaguoja į netikėta aušinimo pastiprinimą ir kaip jis stabilizuojasi.
Kol kas tik tiek. Taip buvo pirmas vakaras. Pratesimas jau čia.
Zaidziant su PID valdymu – labai rekomenduoju naudoti standartine PID kontrolerio forma (K-I-D). Joje proporcines dalies koeficientas neitakos integralines ir diferencialines daliu.
Kiek kita versija. Įdėtas “vidurkinis” “matuojamos” temperatūros filtras, kuris duoda uždelsimą.
