Daugybę metų guli toks lempinis aparatas- Simfonija 003. Gaminta 1971 – 1976. T.y. gali būti mano amžininkė. Maniškė ko gero ~1975 metų gamybos. Bent jau taip parašyta ant lempų ir kondensatorių.

Tai lempinė radiola (radija ir patefonas), tačiau skiriasi nuo daugybės kitų, kad čia stereo aparatas. Gaudo ilgas, vidutines ir ultratrumpas bangas (UTB, kas dabar vadinama FM). Deja iš FM stereo signalo negaudo, nes ji tarybinio standarto stereo kodavimo. O bangas aš jau perstumiau į šiuolaikinį diapazoną. Pakeliui radau gamybos broką FM bloke- kondensatorius nebuvo prilituotas. Bet matyt visiems buvo dzin, kas 1975 klausėsi FM?

Daug lempučių: 6П14П – 4 vnt , 6Н2П – 3 vnt, 6К4П – 3 vnt, 6И1П – 1 vnt, 6Ж1П – 1 vnt, 6Н3П – 1 vnt, 6Е1П – 1 vnt, 6Ф5П – 1 vnt, 6Х2П – 2 vnt. Nuo tokio kiekio jaučiasi šiluma kambaryje.
Praeitam šimtmetyje kiek pamenu veikė tik FM, dabar jau nebe, nes dažniai ne tie. Dažnius persukom. O AM neveikė dėl to, kad nebuvo vienos lemputės. Patefonas kaip ir veikia. Tik bėda- iš galvutės ištekėjo kažkoks snarglys ir ji dabar beveik neveikia. Radau kažkokią kitokią, bet ji visiškai netinka.
Ir atėjo kažkoks momentas, kai kilo noras paremontuoti. Įjungus buvo pastebėta, kad ne tik nėra vienos lemputės, bet ir dvi išėjimo lempos išimtos ir numestos. Sudėjus atgal pastebėta, kad jų anodai įkaito iki raudonumo- vadinasi yra DC nutekėjimas į lempų tinklelius. Tipinė bėda dėl kondensatorių. Dalį kondensatorių užsakiau, bet šiuolaikiniai aukštavolčiai kažkaip brangoki… O poto nusprendžiau, kad kai kuriuos kondensatorius keisiu į bet kokius. Taip 0,047µF x 400V pasikeitė į 0.33µF x 1000V. Nieko, veikia. Tikriausiai žemi pagerėjo1 :).

Taip po truputi pasikeitė 105% popierinių kondensatorių į pagrinde polipropileno ir truputis keramikos. Kodėl daugiau šimto? Ogi įdėjau kelis papildomus kovodamas su trugdžiais.
Vienintelis rimtesnis remontas buvo teisingas UTB diapazono pakeitimas. Teko pakeisti gal kokius 6 kondensatorius ir nuvynioti vieną vija iš geterodino apvijos. Dėl verjėrio ir variatorių, naujas diapazonas apima tik pusę vakarietiško diapazono. Nesvarbu, nes man patinkančios stotys pasigauna.
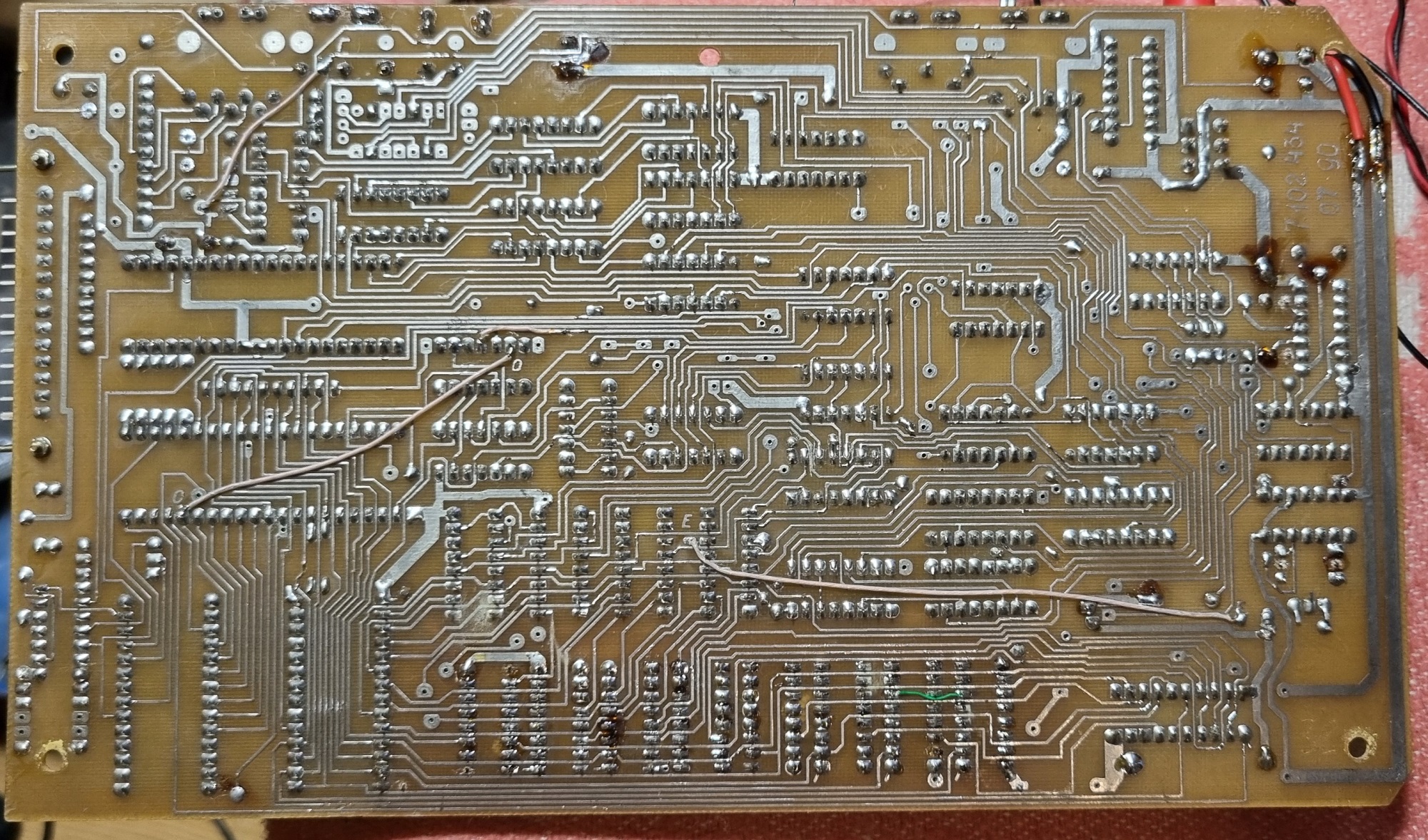
Visdėlto kokie niekšai buvo tie sovietai- schemos iš interneto truputi neatitinka realybes. Kas dar baisiau- niekur nėra “silk screen”, o montažinių schemų numeracija neatitinka principinės schemos numeracijai.
Iš pribumbasų – mechaninis dažnio pareguliavimas su elektromotoru. Tačiau jis kaip ir veikia tik UTB/FM diapazone. Iš čia pasiskolinau ~14V savom reikmėm. O štai originaliam stereo dekoderiui, tranzistoriniam, radijos kurėjai 24V pasidarė iš … 260V (!), rezistoriaus ir dviejų nuosekliai sujungtu stabilitronų.2
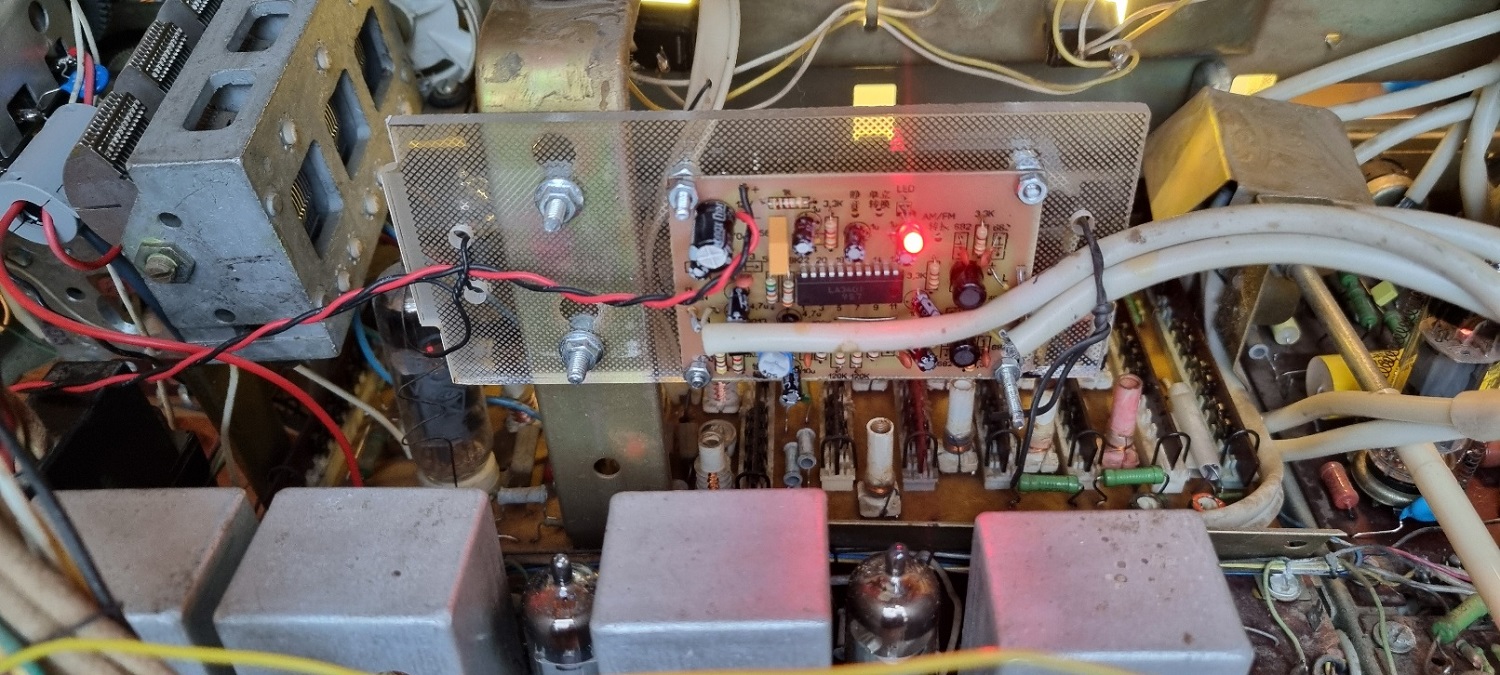
Jei prabilom apie stereo, tai tarybinio standarto dekoderis buvo išmestas ir pastatytas kiniškas modulis. Visiškos kokybės nebus, nes rodos pas tarybinį standartą FM tarpinio dažnio plotis kiek per mažas pilnam stereo signalui.
Beveik visas lempas pakeičiau į naujas, tik geterodino-mixo lempos (6И1П) neradau. Žalios akies lempą (6Е1П) radau visiškai naują, dabar šviečia labai stipriai ir jautriai smaukosi. Veikė tik AM diapazonuose. Poto pradėjo veikti tik FM diapazone, o AM dingo4.
Gal kažkur jungikliuose nėra kontakto. Ten signalai kaip ir ateina iš tarpinio dažnio stiprintuvo ir per jungiklius ateina į šią lemputę. Šiaip, kiekvieną kartą paversdamas radija ant šono, laukiu eilinio siurprizo- tai kažkur laidelis atsilituoja, tai iš viso “šalta pajkė5” ar nebeveikia koks nors jungiklis. Ko norėti- tarybinis palikimas ir darbo kokybė, 50 metų amžius ir dar neteisingas sandėliavimas.
Taigi, akies neveikimas AM liko kaip vienintelis defektas.
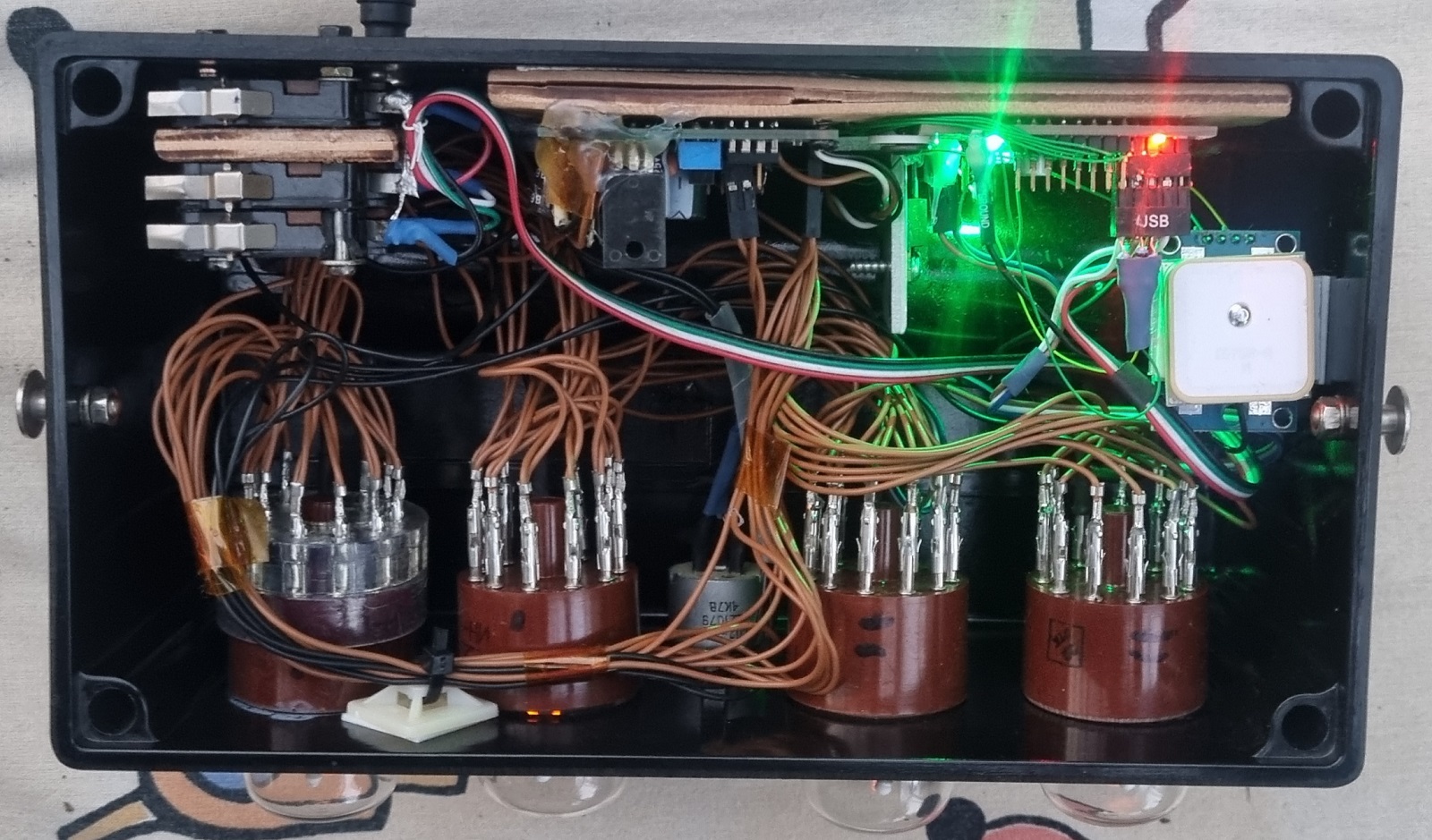
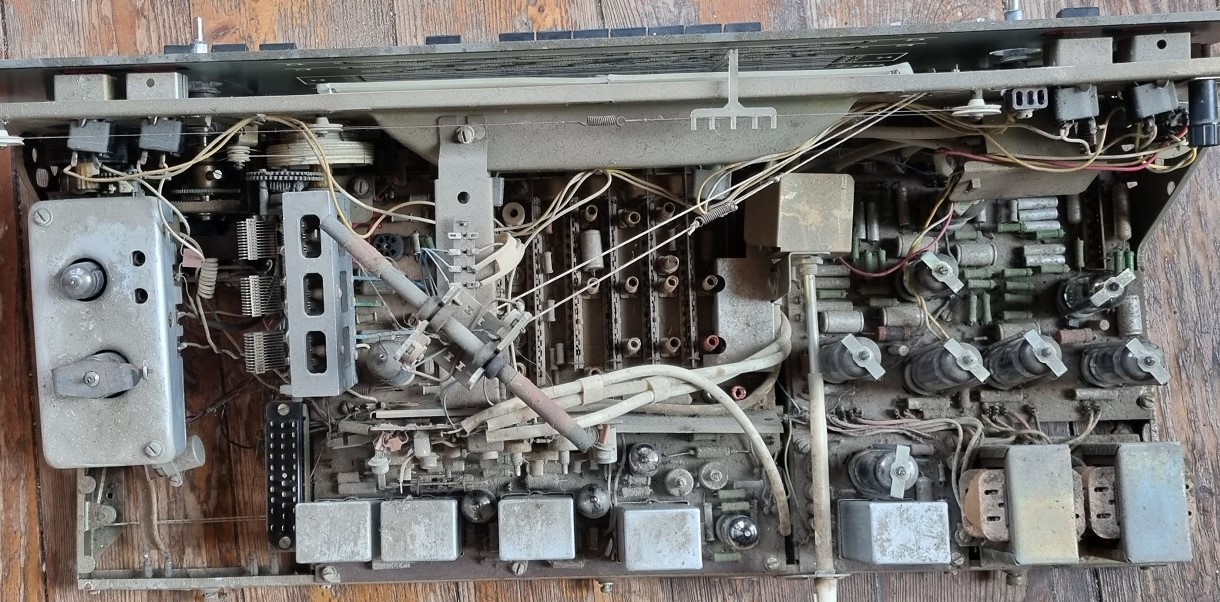
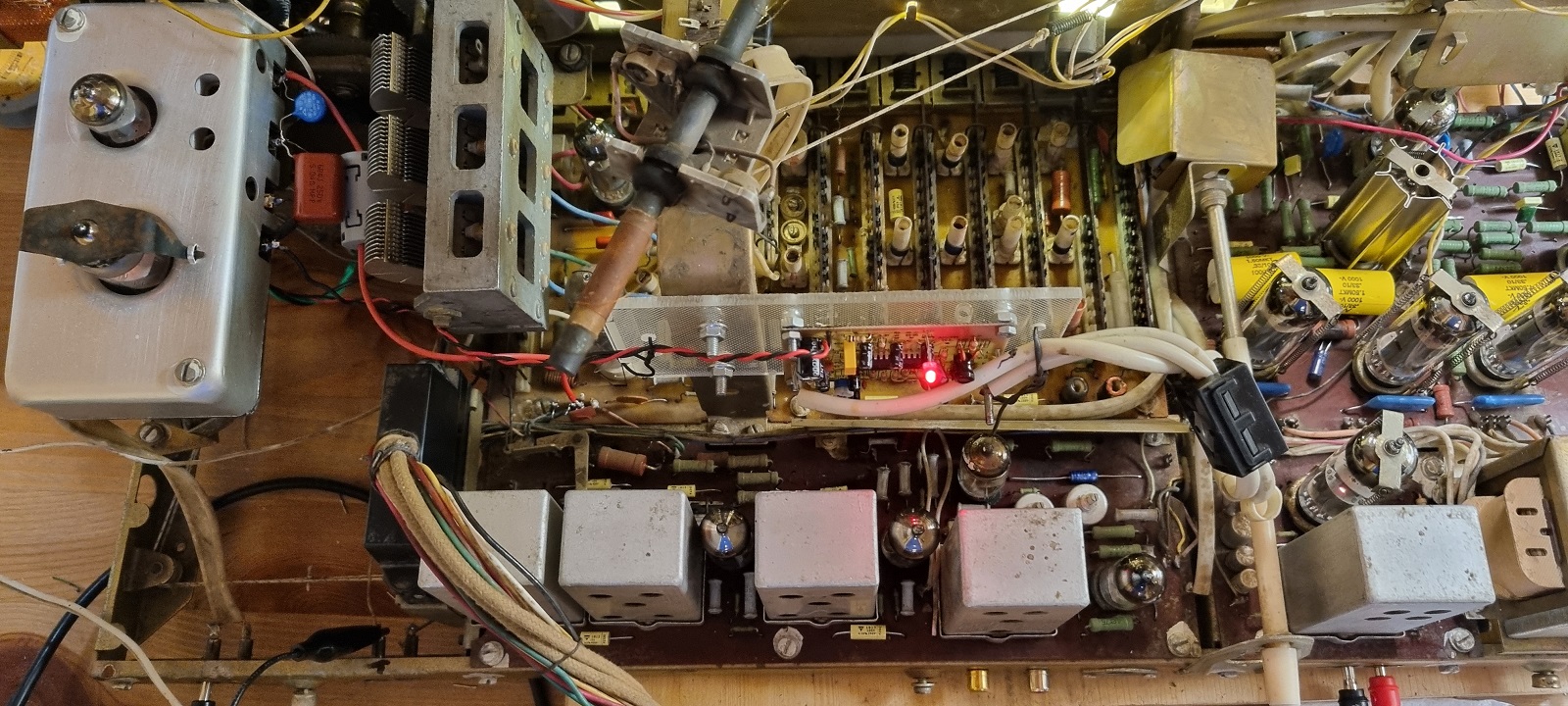
Palyginimui dvi nuotraukos, “before” ir “after”. Gal kiek matysis darbai:
“Kiek” pasikeitė maitinimo šaltinio kondensatorių nominalai:

Radijos kūrėjai apie tokias talpas kogero net negalėjo svajoti. Talpa padidėjo kažkur 5 kartus. Kaip ne keista, mėlyno kondensatoriaus (iškarto po diodų) įtaka minimali. O štai antras, kuris stovi po droselio, labai pamažino 50/100Hz foną. Beja apie talpas- visi išimti kondensatoriai rodė per dideles talpas. Čia taip mano multimetras reaguoja į nedidelius nuotekius. Ir tikrai ten buvo nuotekis, nors 500V megaommetras nieko neparodė.
Dar vienas baisus anachronizmas- apšvietimo lempučių (ir ne tik) keitimas į LED:
- nėra originalių kolonėlių, todėl negaliu nieko pasakyti apie “skambėjimą”. Su pigiom 8Ω kolonėlėm (gal 2 litrų dydžio), skambėjo prastokai. Vėliau radau kolonėles iš kažkokio “prabangaus” televizoriaus, 4Ω. Skamba gana gerai. (aš šiaip glušas, man viskas gerai skamba. beveik) ↩︎
- gaunasi taip: 260-24=236V gesinimas ant 19KΩ rezistoriaus. Pabandžius pasiskolinti įtampą iš čia, nugesinau visiškai 24V. ↩︎
- Dėl signalo lygių skirtumų ir mikroschemos signalas per stiprus, o į mikroschema irgi ateina per didelės amplitudės signalas. Todėl panašu, kad stereo signalas pakraipytas. ↩︎
- Aš tikrai pamenu, kad veikė. Schema ten paprastutė, ir signalas yra. O rezultato nėra. ↩︎
- Toks efektas, kai dėl laiko, lydmetalio kokybės, termostreso ir mechanikos suyra lydmetalis- atsiranda mikro įtrūkimai. ↩︎